
联系电话:4000037778
邮 箱:dlxyzn@163.com
网址:www.lnxyzn.com
地 址:大连市沙河口区五一路40号五星国际403室

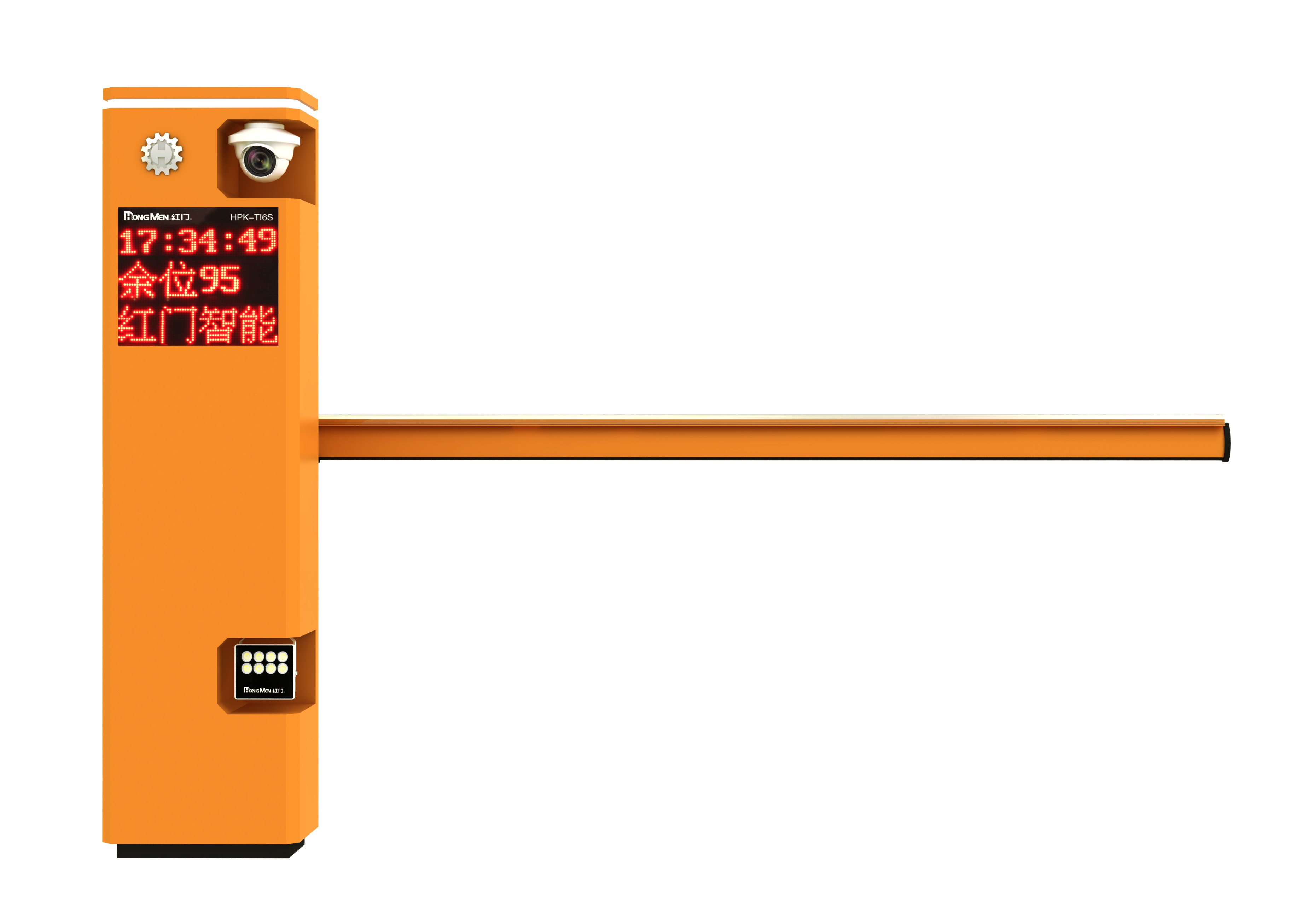
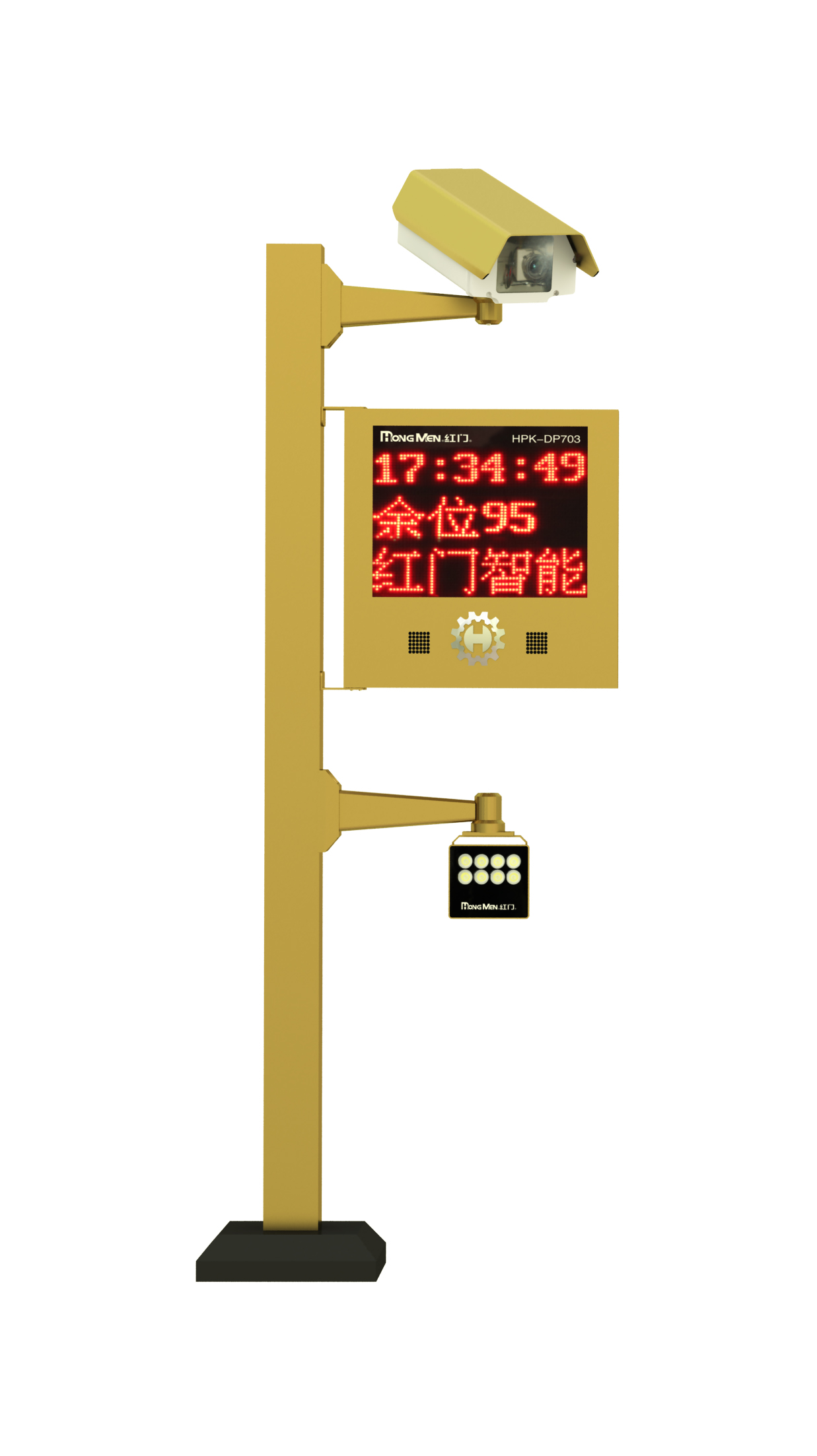
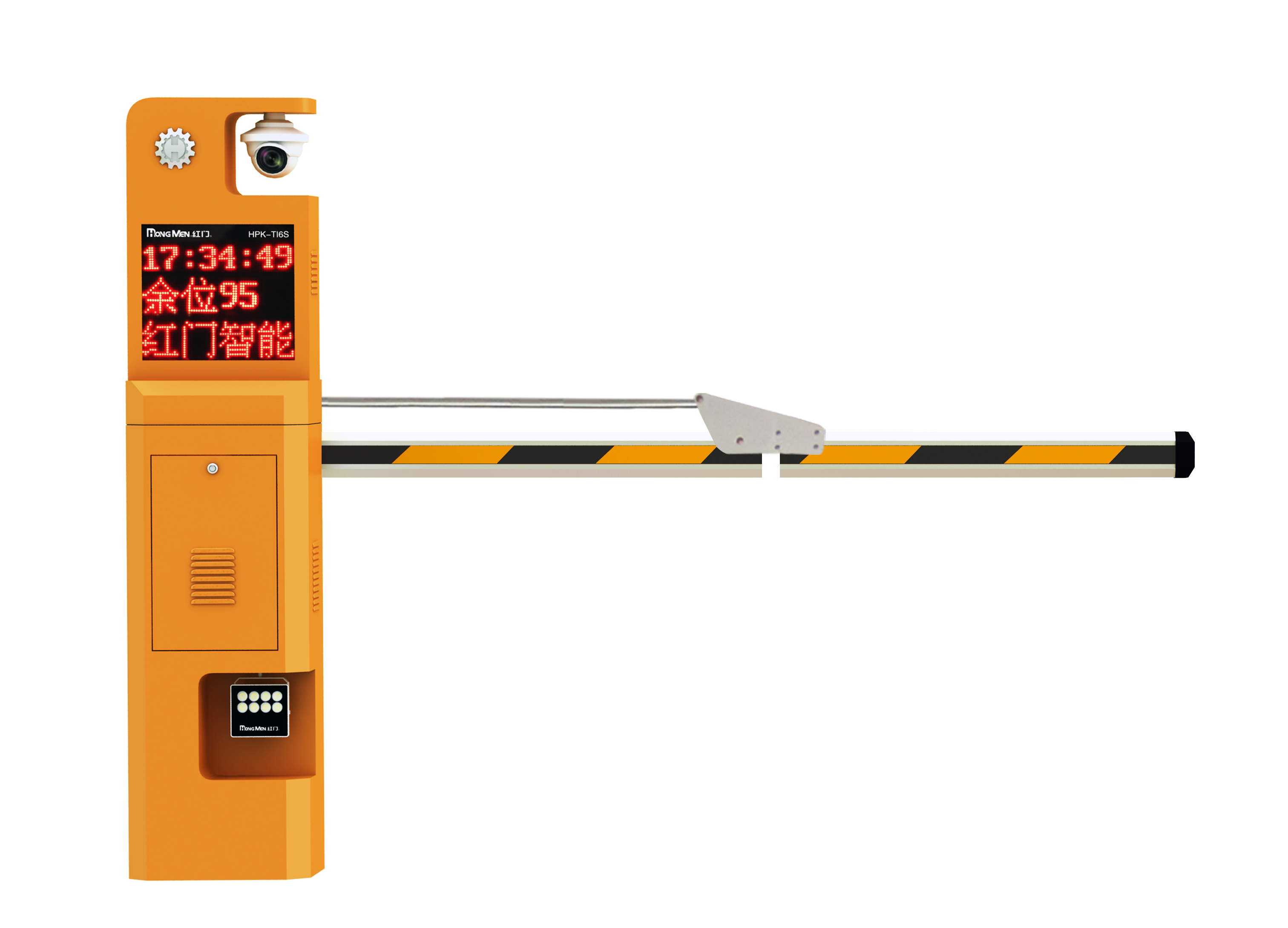
了解停车场系统的安装流程吗?道闸和控制机的安装位置,道闸和控制机(读卡设备)的安装位置相当关键,因为这涉及到用户使用是否方便的问题。一般来说道闸跟控制机之间的距离不能少于2.5米,距离太近可能会造成有的车辆在刷卡时车头碰到闸杆,建议距离为3.5米。专业停车场收费系统车道的宽度也是道闸和控制机安装的一个考虑因素,车道的宽度不要小于3米,过窄会影响车辆出入的通畅,建议宽度为4.5米。停车场收费系统厂家、监控摄像机的安装位置,标准的智能停车场系统一般都会带有图像对比功能,所以在出入口是要安装监控摄像机的。监控摄像机的视角范围要涵盖车辆读卡时车牌的位置,安装高度一般为0.5-2.5米。
机芯,由各种机械部件组成一个整体(包括驱动电机、减速机等),利用机械原理控制拦阻体的开启和关闭动作。影响机芯性能和使用寿命的关键因素包括机械部件的加工工艺和材质,以及最重要的驱动电机和相配套的减速机。专业停车场收费系统转闸,也叫旋转闸,由三辊闸发展而来,借鉴了旋转门的特点(最大的区别在于拦阻体不是玻璃门,而是金属栅栏)。根据拦阻体高度的不同,分为全高转闸(又叫全高闸或全高旋转闸)和半高转闸(又叫半高旋转闸),全高转闸应用比较多。停车场收费系统厂家、拦阻体(闸杆)一般由3根或4根金属杆组成平行于水平面的“丫”(又叫三杆转闸)形或“十”形(又叫十字闸或十字转闸),一般采用中空封闭的不锈钢管,坚固不易变形,通过旋转实现拦阻和放行。

有关大连道闸的调节方法,停车场道闸管理系统的平衡没调好或者松动会使上下落杆不正常,进而还会影响到大连道闸的使用寿命,这里我们总结了道闸平衡状态调节方法,但是道闸多种多样,可能会不尽相同,只能作为参考吧,希望对您有所帮助停车场收费系统厂家、先松开摇臂螺丝,是上活节和摇臂分开,让主轴处于自由状态;安装大连道闸杆,使闸杆处于正常状态;用手将闸杆推到竖直状态;呼和浩特停车场收费系统调节下拉钩,使其与弹簧下拉环接触,随即旋转螺母将下拉钩固定住;将闸杆用手推到水平状态,松开手,此时若闸杆下垂则表示平衡弹簧拉力太小,调整方法为:将闸杆垂直,将弹簧取下,将弹簧上吊板向外旋1-2圈挂上再试,直到水平为止。状态相反时则反向调节即可;锁紧摇臂螺丝、锁紧螺母、下拉钩螺母。

停车场系统的工作流程,入口部分:入口部分主要由入口票箱、自动路闸、地感线圈、入口摄像系统等组成。专业停车场收费系统临时车进入停车场时设在车道下的地感线圈检测车到,入口处的票箱语音提示司机取卡或读卡,并汉字显示屏自动显示车场内剩佘车位等情况。 月租卡车辆进入停车场时,设在车道下的地感线圈检测到车,入口处的票箱语音提示司机读卡,如若有效自动路闸就会放行。停车场收费系统厂家、特殊卡车辆进入停车场时,设在车道下的地感线圈检测车到,入口处的票箱语音提示司机读卡,司机把特殊卡在放口票箱感应区距离内掠过,入口票箱内ID读取该卡的相关信息,若有效,自动放行,出现系统提示语。
影响闸机安全性的八大因素:闸机系统中电源是非常重要的,要提供给组件稳定的工作电压是必要前提,具有良好的滤波和稳压的能力。此外要有很强的抗干扰能力,包括高频感应信号、雷击等。呼和浩特停车场收费系统闸机控制器机箱必须具有一定的防砸、防撬、防爆、防火、防腐蚀的能力,以防止各种破坏的发生。闸机控制单元必须具有各种实时报警的能力,如电源、UPS等各种设备的故障提示,机箱被打开的警告讯息,以及通讯或线路故障等报警通报能力。停车场收费系统厂家、闸机系统的程序设计不能完全倚赖计算机及软件来实现的,计算机是非常不稳定的,所以设计良好的闸机系统中所有的逻辑判断和各种进阶功能的应用,必须倚赖闸机控制单元的硬件系统来完成。
目前,在车牌识别市场上,纯车牌识别系统通过智能化的系统管理方式,实现了对车辆的进出场进行快速的处理和收费,从而提升智能化管理水平,能够广泛应用于 小区、医院、企事业单位、酒店、商超、港口码头和旅游景区等。但其核心依然体现在高识别率上,只有识别率达到一定高度,未来在停车场管理系统领域中才能得到更 为广泛的应用,继续体现其更大的价值。专业停车场收费系统大连车牌识别分为“软识别”“硬识别”关键还是识别率,所以应用纯车牌识别系统的核心是要一套高识别率的车牌识别产品,国内识别率能达到90%以上的识别率的就很少,而纯车牌识别系统一般要求98%以上的识别率,国内当前能达到这个标准的厂家数量不多;再完美的技术也达不到100%的识别率,比如无牌车或者肉 眼都不能识别的车牌,所以需要一套好的“非车牌识别处理机制”,该机制大部分需要在非车牌识别的软件层来解决,但好的车牌识别产品,可以有效的协助,比如 “车型识别与触发”功能,也就是依据车型对车辆进行进入管理,但这项技术比车牌识别本身难度还要更高,国内着手研究的公司就很少,准确率高的就更少了。停车场收费系统厂家、所以纯车牌识别系统厂家诚通智能建议您,如果要选购纯车牌识别系统的话,最好还是从识别率和非车牌识别处理机制这两个点出发!



